利用时延解决方案最大化相控阵性能
2025 年 2 月 6 日
在之前关于真时延单元的第1篇博客文章《真时延:定义及工作原理》中,我们探讨了真时延技术如何在有源电子扫描阵列(AESA)系统中工作,以及实现时延的一些方法;如单片微波集成电路(MMIC)、微带线和带状线。其中,MMIC因其体积小、成本低而最为常用。
在现代通信、雷达和相控阵系统中,时延单元(TDU)是实现精确信号发射和接收的基本组件。这些单元确保多个天线元件之间的信号同步,对于优化波束成形、方向性和距离分辨率等性能指标举足轻重。本文将探讨TDU在相控阵系统中的角色、它们与天线性能的关系,以及不同的设计考量如何影响系统效率。讨论还将深入到TDU与移相器的集成、真时延技术,以及波束宽度、扫描角和阵列尺寸之间的关系。
相控阵系统与时延单元
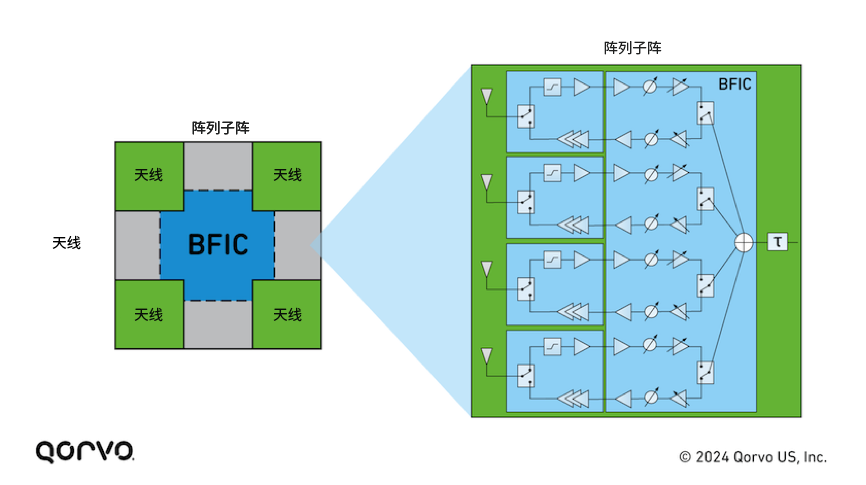
相控阵系统广泛应用于雷达、通信系统和卫星跟踪等需要定向信号发射及接收的应用中。典型的相控阵由单元阵列子阵构成,每个阵列子阵包含多个天线元件及相关电子设备,如波束成形集成电路(BFIC)和射频(RF)前端模块。这些阵列子阵通常按2x2方阵等配置排列,以便根据需要扩展整体阵列的尺寸及性能,如图1所示。

相控阵有效运行的关键在于能够控制每个天线元件接收或发射信号的相对时序。这正是TDU的作用所在;它们通过在信号路径中引入受控时延,以确保阵列中信号的正确时序,从而促进相干波束成形并改善信号的方向性。接下来,让我们探讨一下相控阵系统的主要性能指标。
相控阵的品质因数:EIRP和G/T
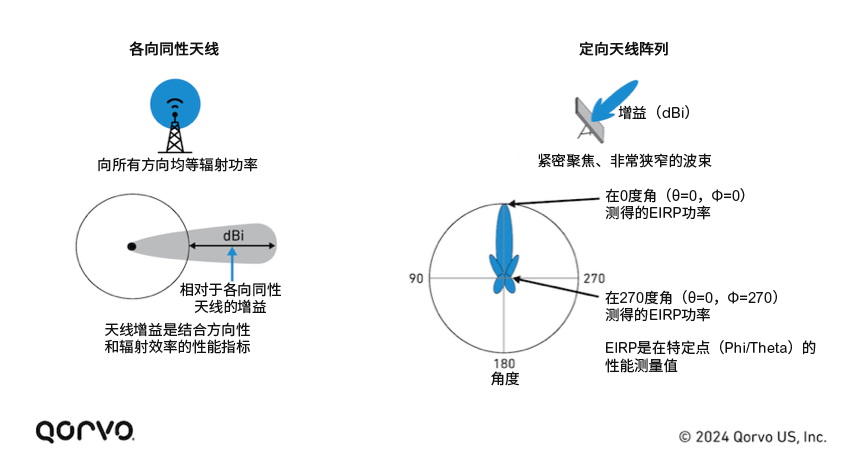
相控阵系统中两个关键的性能指标是等效全向辐射功率(EIRP)和增益温度比(G/T);其中,EIRP衡量发射机功率,而G/T评估接收机的灵敏度。EIRP测量天线阵列在特定方向上的有效辐射功率,这对于在传输过程中实现足够的信噪比(SNR)十分关键。另一方面,G/T是衡量阵列灵敏度的指标,在接收过程中尤为重要。以下是计算这些性能指标所用的数学公式。
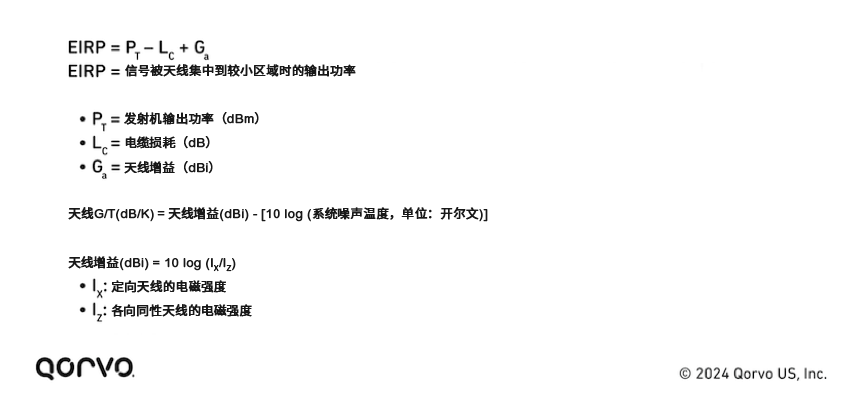
相对于各向同性天线的分贝值(dBi)是一个度量单位,用于描述与同时向所有方向辐射的各向同性辐射器相比,天线在单一方向上的辐射功率大小。这两者间的差异称为天线增益,以dBi形式的数值表示。
EIRP和G/T都与阵列的辐射功率和增益直接相关,而这些又取决于放大器性能、天线设计和波束成形技术。天线阵列和波束成形技术提高了系统的方向性;但随着方向性的增加,波束宽度也随之变窄,从而给保持足够的瞬时带宽带来挑战。此时,工程人员必须仔细评估系统级的权衡因素,以优化设计。
波束成形与阵列设计的权衡
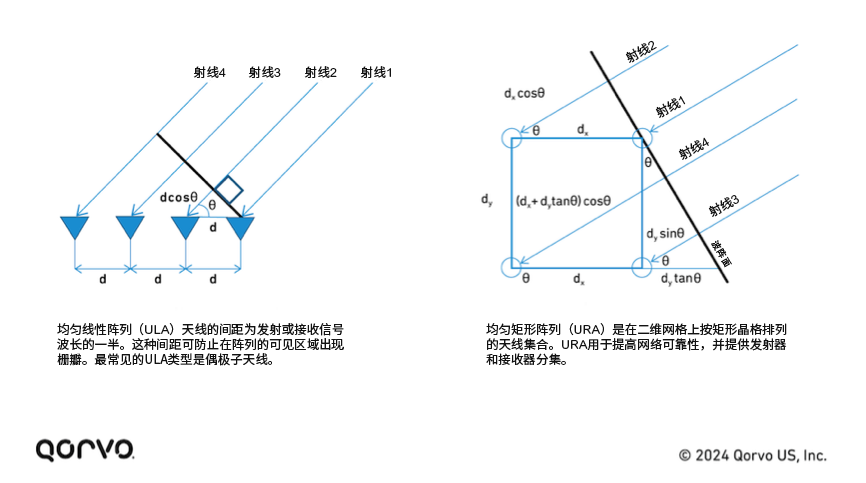
天线阵列通常采用均匀线性阵列(ULA)或均匀矩形阵列(URA)配置进行设计;在这两种设计中天线元件分别沿一个或两个轴等距分布。波束成形技术通过将发射或接收的信号聚焦在一个特定方向(称为到达方向,DOA)来提高阵列的方向性。
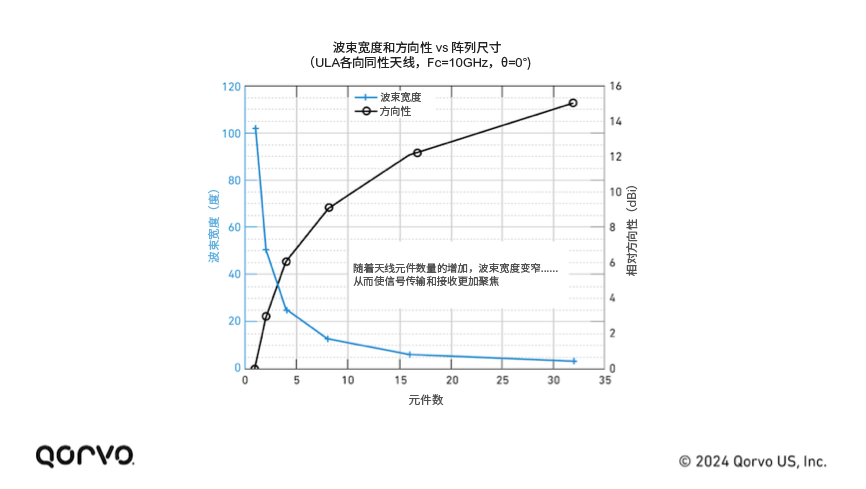
相控阵系统的主要设计权衡之一在于波束宽度与方向性间的取舍。阵列大小和天线元件数量在此权衡中起关键作用。随着元件数量的增加,波束宽度变得更窄,从而提高方向性和增益。然而,过窄的波束宽度可能限制阵列的能力,无法在不显著降低系统瞬时带宽的情况下捕获来自广泛方向的信号。
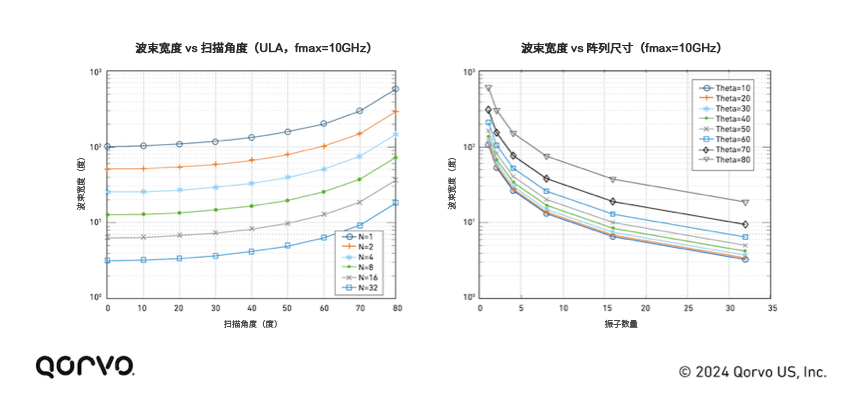
天线阵列的最小波束宽度必须确保瞬时带宽大于所需信号带宽,以保持信号的完整性和性能。天线阵列的波束宽度受阵列大小和最大扫描角度的影响。随着阵列尺寸的增大,尤其是天线元件数量翻倍时,波束宽度会变窄,从而使信号发射和接收更加聚焦。这种聚焦增强了阵列的方向性——大约可翻倍或增加3dB,如图4所示。这种关系对于实现相控阵系统的最佳性能至关重要,其中波束成形和信号方向性是必不可少的。
瞬时带宽与波束宽度
天线阵列的瞬时带宽必须大于所需信号带宽,以确保阵列能够容纳整个信号而不会显著衰减。例如,在雷达系统中,脉冲宽度(Td)决定了所需信号带宽(Bs),较短的脉冲宽度可提供更好的测距分辨率,但会降低最大探测范围。因此,较短的脉冲宽度可提高测距分辨率,从而更容易且更准确地区分彼此靠近的目标。
阵列的波束宽度与阵列中的元件数量(N)和扫描角度(θs)有关。对于在最大频率为10GHz且信号带宽为1.5GHz条件下工作的ULA,阵列最多可以支持16个振子,并且在最大扫描角度为60度时不会显著影响信号质量。阵列的波束宽度可以进一步根据波长(λ)、阵列大小和扫描角度进行计算。

例如,在一个最大频率为10GHz的ULA中,Bs = 1.5GHz,最大扫描角(θs,max)= 60°,则该天线在不显著降低信号质量的情况下,最多可拥有16个阵列振子。
此外,阵列的波束宽度可以通过以下公式定义:
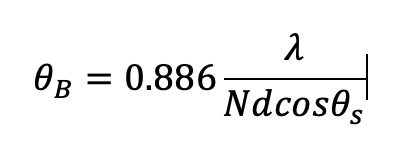
利用上述方程,我们可以定义不同阵列尺寸波束宽度和扫描角度之间的关系,如下图所示。
现在我们有了确定所需带宽、阵列大小和最大扫描角度的数据,以满足系统要求。
确定ULA系统中的真时延
在波束成形系统中,移相器和时延单元都被用来控制信号在阵列振子间的路径。移相器通过改变信号的相位来引导波束指向特定方向;时延单元则在信号中引入真延迟,来获得更精确的控制,尤其是在宽带情况下。
天线阵列的最小波束宽度必须拥有大于所需信号带宽的瞬时带宽。随着阵列尺寸的增加和扫描角度的扩大,这一要求变得尤为关键。TDU引入真时延而非相位移动,可以实现更精确的波束控制,特别是对于宽带信号。
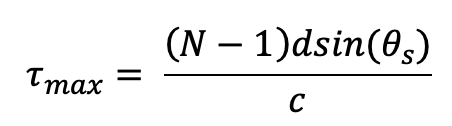
利用下图6中的图表,我们可以确定ULA系统所需的时间延迟。

一个典型6位移相器的最低有效位(LSB)为5.625°。大约需要τ min = 75ps(皮秒)的LSB时延来替代一个5.625 LSB移相器。根据图6和下面的方程,对于一个具有60°最大扫描角的16振子ULA,总共需要650ps的时间延迟。针对更大的阵列或更宽的扫描角,也可以将多个TDU级联起以实现所需的延迟。
波束形成器IC配置中的时延单元类型
AESA天线可以使用移相器或TDU来控制信号波束;每种方式都有不同的权衡。TDU更适合于具有较大瞬时带宽的系统;因为其通过在整个频率范围内保持恒定的相位斜率来防止波束失真(即波束倾斜)。相比之下,移相器保持恒定的相位,但在不同频率下可能导致不同的波束导向角度,因此更适合于较窄带宽的系统。
移相器近似时间延迟,在中心频率上实现最佳波束控制,但在较高频率下可能导致欠转向,在较低频率下则出现过转向。虽然移相器成本更低且应用广泛,但它们可能在宽带应用中产生波束倾斜。
有些架构同时采用TDU和移相器来缓解这一问题,将两者的优势结合起来,如图7右侧所示。工程人员在决定采用哪种方法时,必须考虑系统要求,如阵列尺寸和带宽。在某些情况下,在阵列振子上使用移相器、在部分振子后方布置TDU的混合解决方案可能就足够了;而更大的阵列或宽带应用则可能需要在每个天线振子上都配备TDU。

时延单元拓扑结构
时延单元的实现方法多种多样,包括开关延时线、传输线,以及电感(L)和电容(C)元件。设计人员会综合考虑各种权衡因素,选择最佳的拓扑结构以满足设计要求。拓扑结构的选择取决于系统的具体要求,包括所需的延时范围、精度以及阵列的物理尺寸。
.png)
TDU采用多级结构(由比特位表示)来控制时间延迟。基于开关的TDU设计具有更低的噪声和损耗,但需要更大的裸片尺寸,有时甚至比人工传输线(ATL)设计大三倍。然而,ATL设计由于其人工结构,往往会造成更多的噪声和损耗。
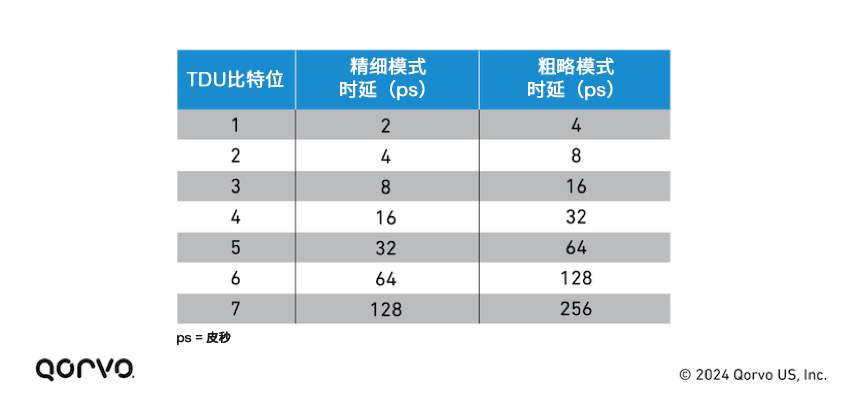
在雷达应用领域,扫描角度起着关键作用;其基于具体应用需求,决定了系统究竟应针对近距离目标检测,还是远距离目标检测进行优化。TDU用于调整脉冲宽度,从而影响检测范围。举例来说,2ps(皮秒)的时延可容纳较短的脉冲宽度,适用于检测较近的物体;而4ps的时延则适用于较长的脉冲,能够检测较远的物体。下表展示了在精细和粗略模式下,每一比特位所代表的皮秒级时延。每个应用都需要特定的时延;例如在精细模式下,TDU提供2ps的最小时延和254ps的最大时延;在粗略模式下,TDU可提供高达508ps的最大时延。
结论
时延单元是现代相控阵系统中的关键组件,提供了精密波束成形和提升系统性能所需的精确控制。无论单独使用还是与移相器结合使用,TDU在雷达、通信系统、卫星跟踪等应用中均发挥着不可或缺的作用,有助于实现所需的波束宽度、方向性和信号带宽。
时延单元的设计和实施涉及多个方面的权衡,包括阵列尺寸、扫描角度和带宽。通过精心选择适当的TDU拓扑和配置,系统设计人员可以在满足日益复杂宽带应用需求的同时优化性能。
关于作者
我们的作者在面向前沿技术开发及优化雷达方案方面拥有丰富的专业技术知识。立足对客户需求和行业趋势的深刻理解,他们与Qorvo的设计团队紧密合作,推动创新,并提供支持行业领先产品的尖端解决方案。
感谢参与本文撰写的主要贡献者:Jame Cheng(高级产品线经理)和 David Schnaufer(技术市场经理);他们的宝贵支持为我们的读者带来专业知识和反映行业趋势的最新信息。
还有其它想让Qorvo专家讨论的话题吗? 将您的建议通过电子邮件发送给Qorvo 博客团队,它可能会出现在即将发布的文章中。